


组成:
1. 本机
(1) 采用主从方式多CPU结构
CPUA:为主控处理器,用于系统管理、与上位机通讯、数据采集及计控实验等。
CPUB:为辅控处理器,用于信号源发生及自控实验等。
CPUC:为自编程处理器,用于提供用户二次开发的单片机自编程。
所有CPU均采用C8051F410芯片,自带A/D、D/A转换,转换精度均为12位(bit)。
(2) 与电脑通讯
采用RS232串口联接,也可加接USB转RS232联接电缆,与电脑USB口联接。
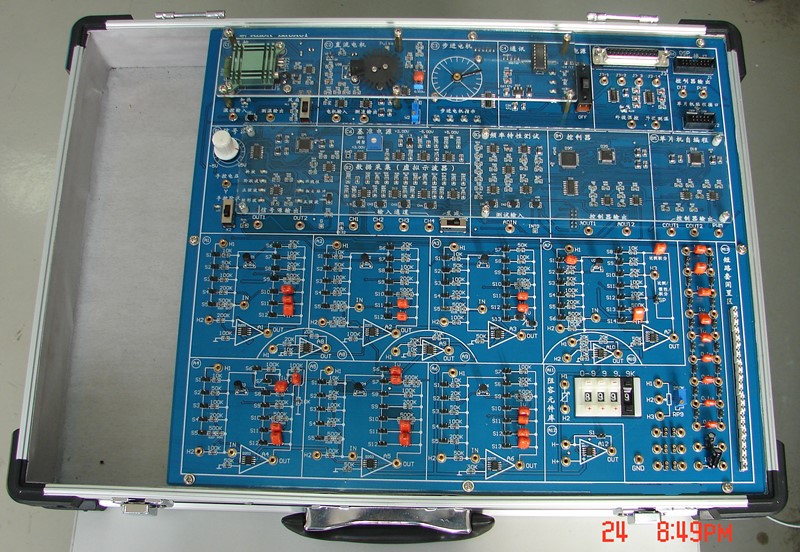
(3) 被控对象(运算模拟单元)
采用模块式结构,提供11个实验用基本运放模拟单元,构成比例环节、惯性环节、积分环节、比例微分环节,PID环节和典型的二阶、三阶系统等。
(4) 阻容元件库
0-999.9K直读式可变电阻
250K电位器
多组电容
(5) 信号源模块CPUB
① 提供矩形波、正弦波、斜坡、阶跃波、方波、微分脉冲等的单信号源,或同时发生两种不同类型信号,其输出幅度、宽度、频率、斜率可在PC机界面上设置。
② 提供继电特性、饱和特性、死区特性、间隙特性、延迟特性等的非线性环节输出,其输出幅度、宽度、斜率可在PC机界面上设置。
③ 每个实验范例都提供信号源默认值。
(6) 频率特性测试模块
实验机自带扫频功能,自动生成闭环、开环伯德图及奈氏曲线(六个),在一个界面上全部显示,观察时可任选一个进行放大显示,方便直观。
可自动搜索谐振峰值或穿越频率。
(7) 数据采集/虚拟示波器模块
在示波器界面分成上、下两块显示区,可同时有多达七个通道显示。
在自动控制原理实验中供虚拟示波器显示用,在计算机控制技术实验中既供虚拟示波器显示用,又可作为控制器模块输入。
数据采集精度为12位(bit)。
(8) 控制器模块CPUA
在计算机控制技术实验中用于计算机的控制计算与输出。A/D、D/A转换精度为12位。
PID控制及直接数字控制实验的控制参数(包括采样周期)可在界面上直接设定和修改,每项范例实验的控制参数(包括采样周期),都在界面上向用户提供了默认值。
(9) 温控、直流电机、步进电机模块
温控模块由温度载体、功率放大器、调节器、温度传感器、T/V转换器等组成,可进行离散增量型PID闭环控制、PWM方式PID闭环控制、位式闭环控制及外接烤箱PID闭环控制。
直流电机模块由直流电机、电机驱动功率放大器、调节器、电机转速检测传感器、F/V转换器等组成,可进行直流电机转速数字PID闭环控制。
步进电机模块由步进电机及指针等组成,可进行步进电机转速数字四相四拍、四相八拍方式工作,正、反转及转速控制,并提供实验范例。
(10) 外设接口模块
提供外设的扩展接口,例如烤箱的温度控制。
2. 选购件
单片机自编程模块CPUC:在单片机自编程计控实验中用于计算机的控制计算与输出。
C平台自编程模块
U-EC5仿真模块(用于单片微处理器自编程计控实验)。
二、实验项目
自动控制原理实验
线性系统的时域分析:典型环节的模拟研究、二阶系统和三阶系统的稳定性和瞬态响应。
线性控制系统的频域分析:一阶惯性环节的频率特性曲线实验、二阶闭环和开环系统的频率特性曲线实验。
线性系统的校正与状态反馈:频域法串联超前校正、频域法串联迟后校正、时域法串联比例微分校正、时域法局部比例反馈校正、时域法微分反馈校正和线性系统的状态反馈及极点配置。
非线性系统的相平面分析:典型环节、二阶非线性控制系统和三阶非线性控制系统。
计算机控制技术实验
采样/保持与微分/数字滤波
简单数字PID控制:被控对象辨识,0型和Ⅰ型的二阶/三阶位置型/增量型/积分分离/带死区/带有延迟对象PID控制。
串级PID控制:二阶/三阶串级控制
比值PID控制:单闭环/双闭环比值控制
位式控制
前馈-反馈PID控制:静态/动态前馈-反馈控制
解耦PID控制:静态/动态前馈补偿解耦控制
直接数字控制实验:大林算法控制、最少拍控制
自编程计控实验
C++自编程、单片机自编程计控实验。
实验项目同计算机控制技术实验PID控制。
控制系统应用实验
直流电机PID转速控制
温度增量型PID控制
附件7:实验项目
1. 自动控制原理实验项目
(1) 线性系统的时域分析实验:
典型环节的模拟研究
二阶系统的瞬态响应和稳定性
三阶系统的瞬态响应和稳定性
(2) 线性控制系统的频域分析实验:
一阶惯性环节的频率特性曲线
二阶闭环和开环系统的频率特性曲线实验
(3) 线性系统的校正与状态反馈:
频域法串联超前校正
频域法串联迟后校正
时域法串联比例微分校正
时域法局部比例反馈校正
时域法微分反馈校正
线性系统的状态反馈及极点配置
(4) 非线性系统的相平面分析实验:
典型环节的模拟研究
二阶非线性控制系统
三阶非线性控制系统
2. 计算机控制技术实验项目
(1) 采样与保持
采样实验
采样控制
(2) 微分与数字滤波
一阶微分反馈控制
四点微分均值反馈控制
模拟一阶惯性数字滤波
四点加权平均数字滤波
(3) 数字PID控制:
被控对象辨识
对象开环辨识
对象闭环辨识
二阶PID控制
位置型PID控制
增量型PID控制
积分分离PID控制
带死区PID控制
型位置型PID控制
型增量型PID控制
带有延迟对象PID控制
三阶PID控制:
位置型PID控制
型位置型PID控制
型增量型PID控制
串级PID控制
二阶串级PID控制
三阶串级PID控制
比值PID控制:单闭环/双闭环比值控制
单闭环比值PID控制
双闭环比值PID控制
前馈-反馈控制
静态前馈-反馈PID控制
动态前馈-反馈PID控制
解耦控制
静态前馈补偿解耦PID控制
动态前馈补偿解耦PID控制
(4) 二阶位式控制
(5) 直接数字控制实验
大林算法控制
大林算法控制
消除振铃大林算法控制
最少拍控制
最少拍有纹波控制系统
最少拍无纹波控制系统
3. 控制系统应用实验项目
直流电机PID转速控制
温度增量型PID控制
温度PWM方式PID控制
温度位式控制
烤箱位式控制
步进电机转速、转角控制
温度PWM方式PID控制
温度位式控制
烤箱位式控制
步进电机转速、转角控制
特色功能
被控对象采用模块式结构:采用模块式结构将使被控对象构建方便,只须采用短路套跨接及少量模块间的联线就能构造出各种型式和阶次的模拟环节,直观且简化了实验操作和设备管理。
时域分析界面:可同时有多达七个通道显示,波形可随意移动和调整,每个实验只运行一个周期,并在界面上显示该实验的原理图。
频域分析界面:用户可随意选择设置所需测试的频率点,系统集成软件一次生成六种特性曲线,并在一个界面上全部显示。用户可在曲线上随意增添频率点,查找各特征参数。
计算机控制技术实验直观性:PID控制及直接数字控制实验的控制参数可直接在界面上设定和修改,每项实验都提供默认值。
多种自编程计控实验平台:提供C平台自编程和单片机自编程两种计控实验平台,每种平台都提供集成开发环境和范例程序。
备注:目前其它生产商暂时还无法达到这个指标。

 QQ客服1
QQ客服1